




Determinan adalah suatu fungsi tertentu yang menghubungkan suatu bilangan real dengan suatu matriks bujursangkar.
Sebagai contoh, kita ambil matriks A2×2
-
- A =

- untuk mencari determinan matrik A maka,
-
- detA = ad – bc
Determinan dengan Ekspansi Kofaktor
Determinan dengan Minor dan kofaktor
-
- A =
– 2
 + 3
+ 3 = 1(-3) – 2(-8) + 3(-7) = -8
= 1(-3) – 2(-8) + 3(-7) = -8
- A =
Determinan dengan Ekspansi Kofaktor Pada Kolom Pertama
Pada dasarnya ekspansi kolom hampir sama dengan ekspansi baris seperti di atas. Tetapi ada satu hal yang membedakan keduanya yaitu faktor pengali. Pada ekspansi baris, kita mengalikan minor dengan komponen baris pertama. Sedangkan dengan ekspansi pada kolom pertama, kita mengalikan minor dengan kompone kolom pertama.Misalkan ada sebuah matriks A3×3-
- A =
– 4
+ 3 = 1(-3) – 4(-8) + 3(-7) = 8
- A =
Adjoin Matriks 3 x 3
Bila ada sebuah matriks A3×3-
- A =

- A =
Kofaktor dari matriks A adalah-
- C11 = -12 C12 = 6 C13 = -16
- C21 = 4 C22 = 2 C23 = 16
- C31 = 12 C32 = -10 C33 = 16
maka matriks yang terbentuk dari kofaktor tersebut adalahuntuk mencari adjoint sebuah matriks, kita cukup mengganti kolom menjadi baris dan baris menjadi kolom-
- adj(A) =

- adj(A) =
Determinan Matriks Segitiga Atas
Jika A adalah matriks segitiga nxn (segitiga atas, segitiga bawah atau segitiga diagonal) maka det(A) adalah hasil kali diagonal matriks tersebutContoh-
 = (2)(-3)(6)(9)(4) = -1296
= (2)(-3)(6)(9)(4) = -1296
Metode Cramer
jika Ax = b adalah sebuah sistem linear n yang tidak di ketahui dan det(A)≠ 0 maka persamaan tersebut mempunyai penyelesaian yang unik dimana A j adalah matrik yang didapat dengan mengganti kolom j dengan matrik bContoh soal:Gunakan metode cramer untuk menyelesaikan persoalan di bawah ini
dimana A j adalah matrik yang didapat dengan mengganti kolom j dengan matrik bContoh soal:Gunakan metode cramer untuk menyelesaikan persoalan di bawah ini-
- x1 + 2x3 = 6 ; -3x1 + 4x2 + 6x3 = 30 ; -x1 – 2x2 + 3x3 = 8
Jawab:bentuk matrik A dan b-
- A =
- A =
kemudian ganti kolom j dengan matrik b-
- A1 =
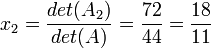
 A2 =
A2 =  A3 =
A3 = 
- A1 =
dengan metode sarrus kita dapat dengan mudah mencari determinan dari matrik-matrik di atasmaka,Tes Determinan untuk Invertibilitas
Pembuktian: Jika R di reduksi secara baris dari Ä. Sebagai langkah awal, kita akan menunjukkan bahwa det(A) dan det(R) keduanya adalah nol atau tidak nol: E1,E2,…,Er menjadi matrix element yang berhubungan dengan operasi baris yang menghasilkan Rdari A. Maka,R=Er…E2 E1 Adan,det(R)=det(Er)…det(E2)det(E1)det(EA)Jika A dapat di-invers, maka sesuai dengan teoremaequivalent statements , maka R = I, jadi det(R) = 1 ≠ 0 dan det(A) ≠ 0. Sebaliknya, jika det(A) ≠ 0, maka det(R) ≠ 0, jadi R tidak memiliki baris yang nol. Sesuai dengan teorema R = I, maka A adalah dapat di-invers. Tapi jika matrix bujur sangkar dengan 2 baris/kolom yang proposional adalah tidak dapat diinvers.Contoh Soal :A=dengan metode Sarrus, kita dapat menghitung determinan dari matrix Adet(A) = 64 1+3x2= λx1 4x1+2x2=λx2dapat ditulis dalam bentuk
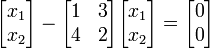
1+3x2= λx1 4x1+2x2=λx2dapat ditulis dalam bentuk

= λ
yang kemudian dapat diubah-
- A =dan x =
- A =
yang kemudian dapat ditulis ulang menjadi= λ
= λ

 sehingga didapat bentuk
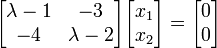
sehingga didapat bentukλ I - A =
 namun untuk menemukan besar dari λ perlu dilakukan operasi
namun untuk menemukan besar dari λ perlu dilakukan operasidet (λ I - A) = 0 ;λ adalah eigenvalue dari A
dan dari contoh diperolehdet (λ I - A) =
= 0
atau λ^2 – 3λ – 10 = 0dan dari hasil faktorisasi di dapat λ1 = -2 dan λ2 = 5dengan memasukkan nilai λ pada persamaan (λ I – A) x = 0, maka eigenvector bisa didapat bila λ = -2 maka diperoleh dengan mengasumsikan x2 = t maka didapat x1 = t
dengan mengasumsikan x2 = t maka didapat x1 = tx =
-
- A =









Posting Komentar